電子工作を始めて数ヶ月になりますが、これまではセンサを用いた実務的なものばかりを作ってきました。
この手のものばかりを作っていてもつまらないので、たまにはおもちゃを作ってみようと思い立ちました。
何かに反応して動くようなものを作りたいと思い、素材を探していると、これが見つかりました。
子供が数年前に買って、組み立て途中で放ったらかしになっていた「タミヤ 楽しい工作シリーズ組み立てキット リモコンロボット(クローラータイプ)」です。
これにArduinoを搭載し、スケッチに従って動く「ロボット」を作りたいと思います。

前後左右に動くだけで良いので、上のアーム部分とリモコンボックスは撤去し、各部のネジを締め直しました。
モーター2個で、前後左右の動きをコントロールできる状態になりました。
次に、Arduinoと、モータドライバIC(TA7291P) 2個を追加しました。ロボットが前後に動くだけのスケッチを作成し、正常に動くことを確認しました。
その後、四角を描くように動いたり、丸を描くように動いたりするようにスケッチを改良し、いずれも正常動作しました。見ていた子供は大喜びでした(やっぱり動くものは、子供の食いつきが違います)。
ロボットがArduinoで制御できるようになったので、次に、ロボットの全面左右に光センサを取り付けました。ロボットが左右の明るさの差を認識して、懐中電灯のある方向を向くようにしました。思ったより簡単に正常動作させることができました。
さらに、子供の提案を活かして、ロボットの後面にも光センサを追加しました。後ろから光をあてた時に、ロボットが反転するようにします。
あわせて、モータードライバICのVREF端子に、Arduino出力信号を繋ぐように変更しました。左右の明るさの差が大きい時には速く、差が小さい時にはゆっくり動くようにスケッチを改良しました。
できあがりです。
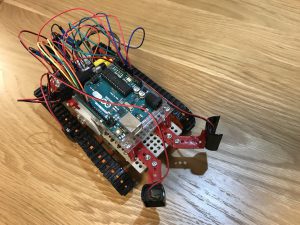
最終的な回路図は以下のとおりです。
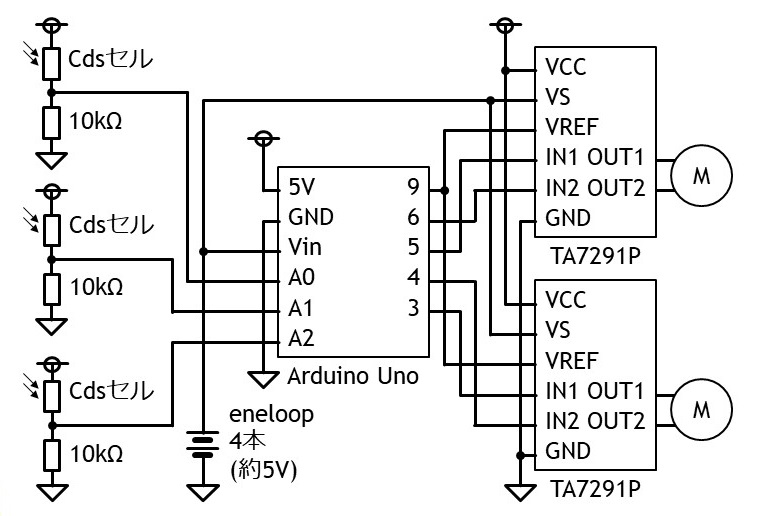
また、スケッチは以下のとおりです。
int L1 = 5;
int L2 = 6;
int R1 = 3;
int R2 = 4;
int VREF = 9;
int MaxSpeed = 200;
int MinSpwwd = 120;
void setup() {
Serial.begin(9600);
pinMode( A0, INPUT );
pinMode( A1, INPUT );
pinMode( A2, INPUT );
pinMode( L1, OUTPUT );
pinMode( L2, OUTPUT );
pinMode( R1, OUTPUT );
pinMode( R2, OUTPUT );
pinMode( VREF, OUTPUT );
}
void loop() {
int Beye = analogRead(A0);
int Leye = analogRead(A1);
int Reye = analogRead(A2);
Serial.print(" L:");
Serial.print(Leye);
Serial.print(" R:");
Serial.print(Reye);
Serial.print(" B:");
Serial.print(Beye);
Serial.println();
if(Beye-Leye>50 && Beye-Reye>50){
if(Leye>Reye){
analogWrite( VREF, MaxSpeed );
digitalWrite( L1, LOW );
digitalWrite( L2, HIGH );
digitalWrite( R1, HIGH );
digitalWrite( R2, LOW );
delay( 3000 );
}
else{
analogWrite( VREF, MaxSpeed );
digitalWrite( L1, HIGH );
digitalWrite( L2, LOW );
digitalWrite( R1, LOW );
digitalWrite( R2, HIGH );
delay( 3000 );
}
}
else if(Leye-Reye>50){
int Speed = Leye-Reye+100;
if(Speed>MaxSpeed){
Speed=MaxSpeed;
}
analogWrite( VREF, Speed );
digitalWrite( L1, LOW );
digitalWrite( L2, HIGH );
digitalWrite( R1, HIGH );
digitalWrite( R2, LOW );
delay( 50 );
}
else if(Reye-Leye>50){
int Speed = Reye-Leye+100;
if(Speed>MaxSpeed){
Speed=MaxSpeed;
}
analogWrite( VREF, Speed );
digitalWrite( L1, HIGH );
digitalWrite( L2, LOW );
digitalWrite( R1, LOW );
digitalWrite( R2, HIGH );
delay( 50 );
}
else{
digitalWrite( L1, HIGH );
digitalWrite( L2, HIGH );
digitalWrite( R1, HIGH );
digitalWrite( R2, HIGH );
delay( 50 );
}
}
動きはガタガタしていて、スケッチの各数値をチューニングする必要はありますが、とりあえず当初考えていた動作は実現できました。