以前、マイクロビットとモータードライバなどを組み合わせて「マイクロビットロボカー」をつくりました(記事は こちら)。
このロボカーは、一般的な拡張ボードやギヤ付モーターなどを組み合わせたもので、各パーツ間の配線がやや面倒な他、使用するモーターと電池の残容量(電圧)によってはモーターの回転が不安定になるなど、こどもにつくってもらうには少々難易度が高いものでした。
さて、先日「KEYESTUDIOモータードライバー拡張ボード(KS4033)」という製品を入手しました。
この拡張ボードにはモータードライバが搭載されています。またボードに供給する電源電圧は5V〜10.8Vとなっており、供給電圧に基づいてモーターへも電源出力します。
このボードを使うことで、「配線が面倒」「電池の電圧によってモーター動作が不安定になる」という課題が解決しそうです。
今回は、この「KEYESTUDIOモータードライバー拡張ボード(KS4033)」をつかって、改めて「マイクロビットロボカー」をつくってみたいと思います。
つかう部品はこちらです。
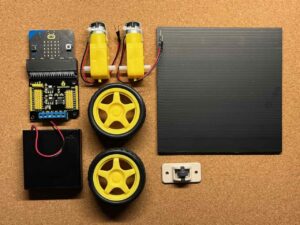
- マイクロビット1個
- 拡張ボード(KS4033) 1個
- 電池ボックス(単三×4本) 1個
- 単三電池 4本
- ギヤ付モーター2個
- タイヤ 2個
- キャスター 1個
- プラダンボール1枚
ギア付きモーターとタイヤは、アマゾンで購入したものです。
プラダンボールはロボカーのベース(ボディ)に、キャスター(ダイソーで購入)は前輪に使用します。
モーターにはあらかじめ、コードを取り付けておきます。今回はブレッドボードにも刺せるようにオスコネクターをつけていますが、これはなくても構いません。
また、拡張ボードには電池ボックスを取り付けておきます。
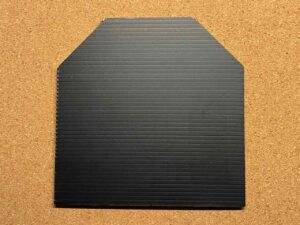
まずはベースの作成です。
15センチ角のプラダンボールを用意し、前側の角ふたつについて、角から4センチのところで斜めにカットします。
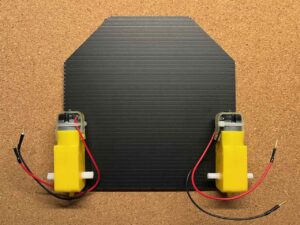
両面テープをつかって、ベースにモーターを貼り付けます(両面テープは「スコッチ超強力両面テープ プレミアゴールド スーパー多用途」などがおすすめです。一般的な両面テープではうまく付きません)。内部からオイルが滲み出ている場合は、アルコールティッシュなどで拭いてから貼り付けてください。
モーターのリード線が内側にくるよう、向きに注意してください。
拡張ボードとモーターを、以下のとおりにつなぎます。

| 拡張ボード | モーター |
|---|---|
| A1 | 右モーター 赤 |
| A2 | 右モーター 黒 |
| B1 | 左モーター 黒 |
| B2 | 左モーター 赤 |
両面テープをつかって、拡張ボードと電池ボックスをベースに貼り付けます。
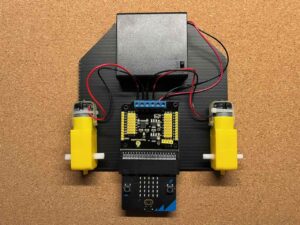
ベースの裏にキャスターを貼り付けます。
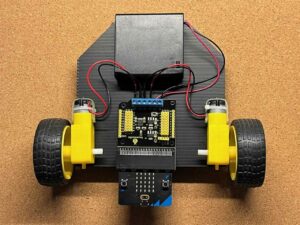
ギヤ付きモーターに、タイヤをはめ込んだら完成です。
動作確認のため、マイクロビットに以下のようなプログラムを書き込みます。
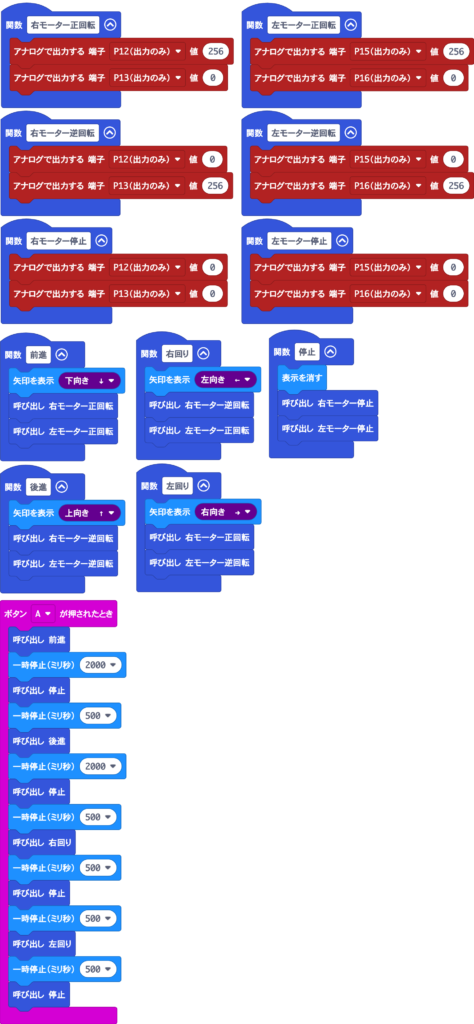
電池ボックスのスイッチをONにし、マイクロビットの「A」ボタンを押すと、ロボカーが、「前進」→「後進」→「右回転」→「左回転」します。
プログラムを変更すると、自分の好きなようにロボカーを動かすことができます。
その際には、今回つくったプログラムのうち、11個の関数はそのまま残し、メインプログラムだけを変更することで、プログラムの作成が簡単になります。
マイクロビットのプログラムによって自在に動かすことのできる「ロボカー」ができました。