マイクロビットでふたつのサーボモーターを制御して「ロボットアーム」のようなものをつくりました(記事は こちら)。
また、マイクロビットとモータードライバを使って、エナメル線でつくった「電磁石」をオン・オフできるようにしました(記事は こちら)。
今回は、ロボットアームの先端に電磁石を取り付け、ロボットアームでモノを運んでみたいと思います。
リンク
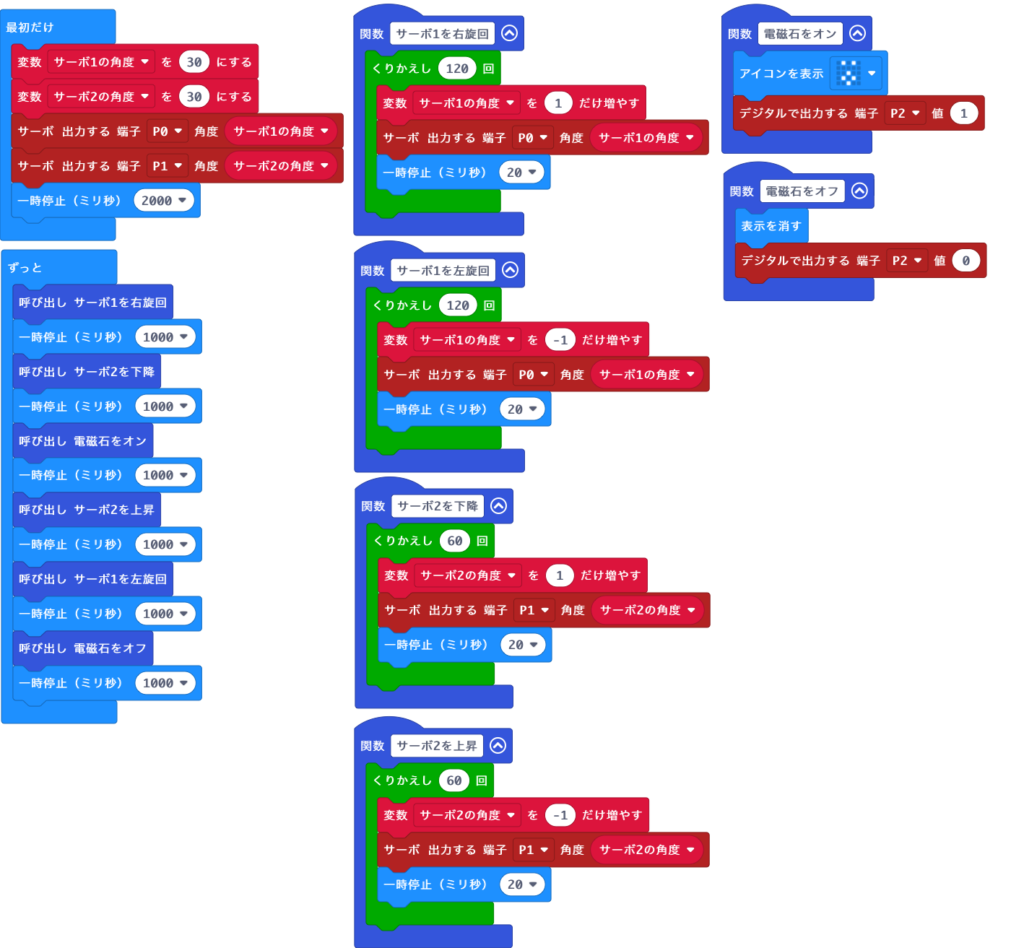
プログラムはこちらです。
アームが右側に移動して下降した後、電磁石がオンになります。
その後アームは左側に移動して電磁石がオフになります。
これを繰り返すことで、右側に置いたクリップを左側に移動させます。
アームの先端に電磁石を取り付けます。

マイクロビットを木の板に取り付け、ロボットアームと一体化させておきます。
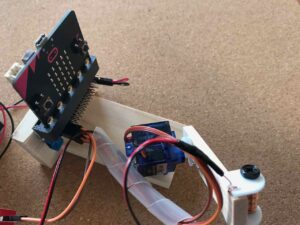
電磁石の消費電流が非常に大きく、電磁石とサーボモーターを同じ電池で動かすと、サーボモーターの動きがガタガタになってしまったため、電磁石とサーボモーターは別の電池で駆動することとします。

動かした結果はこちらです。
なかなかいい感じに動いてくれました。