先日、マイクロビットにモータードライバとモーター2個をつないで「マイクロビットロボカー」をつくりました(記事は こちら)。
プログラムを工夫することで、いろいろな動きをさせることができるのですが、せっかくなので、もっとかっこいいスポーツカータイプのロボカーもつくりたいと思います。
子供が遊ばなくなった、こちらのラジコンカーを改造することにします。

このラジコンカーは、普通の工作用モーター2個で動くので(前進・後進用と前輪の操舵用)、回路接続は基本的に前回のロボカーと同じになります。
回路を車の中に格納するために、小さいブレッドボードを使いました。

このラジコンカーの電池ボックスは単三電池×4本用で、4本の電池が直列接続されていましたが、このロボカーは電池2本で動くため、2本ずつが並列になるように電池まわりの接続を変更しました。

また、電源ノイズ対策のため、電源-グランド間に0.1μFと47μFのコンデンサをひとつずつ入れておきました。
車のライト部分にLEDがついていたので、電源スイッチを入れるとLEDが光るようにしました。

できあがりはこんな感じです。

もう1台のマイクロビットで、ロボカーを操縦できるようにしてみます。
操縦用マイクロビットのプログラムは以下のとおりです。
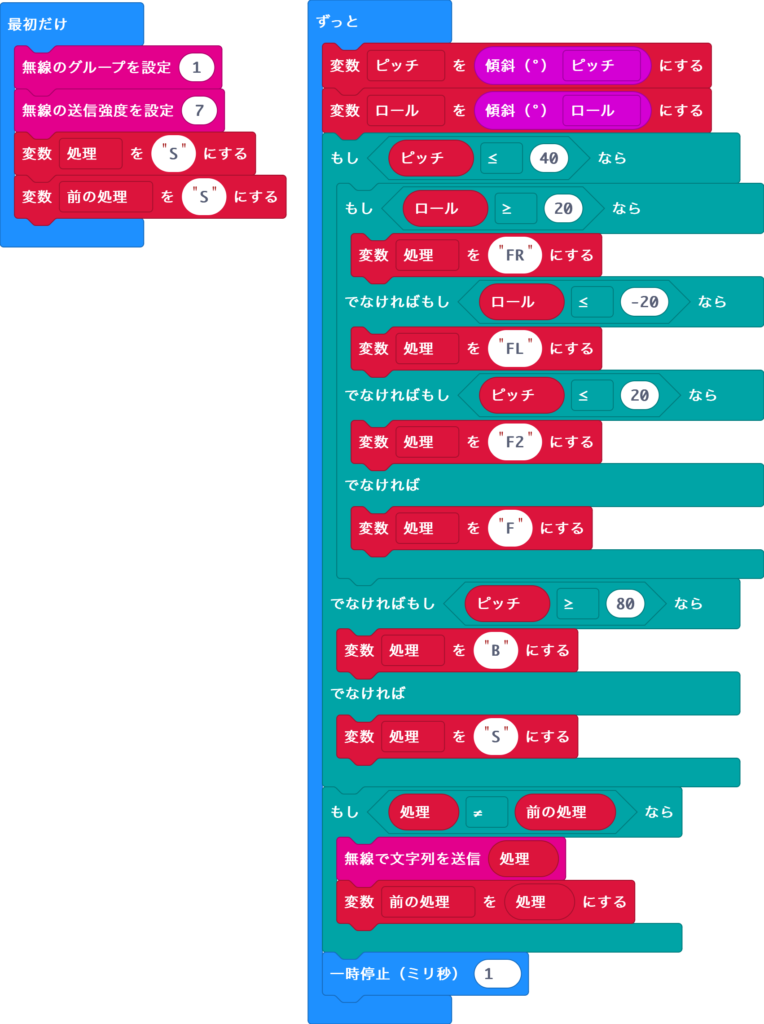
マイクロビットを前後左右に傾けることで、進行方向を表す文字列を無線で送信します。
操縦用マイクロビット(電源ボードつき)は、おもちゃのハンドルにテープで貼り付けました。

ハンドルを前後左右に傾けることで、その内容にあった文字列が送信されることになります。
ロボカー用マイクロビットのプログラムは以下のとおりです。

受信した文字列にあわせて、モータードライバの入力信号を変更するようになっています。
前進については、高速・低速の変更もできるようにしました。
ハンドルを傾けることで、ロボカーを前後左右に動かすことができました。
マイクロビットで動くものをつくる場合、モーターやギヤなどの駆動部分の部品代がそれなりにかかってしまいますが、このように使わなくなったおもちゃを活用することで、あまりお金をかけずに工作できるかもしれません。