タミヤの「楽しい工作シリーズ 水中モーター」を使って、船のように水の上を移動するロボットを作ります。

機能
先日、マイクロビットを2台使い、無線で操作するロボットを作りました(記事はこちら)。
このロボットでは、送信側のmicro:bitを傾けることで、ロボットの進行方向を指示します。受信側のmicro:bitは、タミヤの「楽しい工作シリーズ組み立てキット リモコンロボット」に搭載し、ふたつのモーターに接続します。送信側micro:bitの指示を無線で受け取り、指示どおりにモーターを動かします。
今回は、これを少し改良して、リモコンロボットの代わりに、ふたつの水中モーターを制御することにします。
ふたつの水中モーターを船の底に並べて取り付け、それぞれのモーターの回転方向を制御することで、船をさまざまな方向に動かしてみます。
micro:bitのプログラムや、micro:bitとモータを接続する回路は、前回と全く同じです。
作り方
タミヤの「楽しい工作シリーズ 水中モーター」は、組み立て式です。

まずは説明書のとおりに組み立てます。

同じものをふたつ組み立て、余っているパーツで横に並べます。

今回は、このモータを外部から制御したいので、モータの端子にコードを直結します。モータのケースに穴を開け、そのコードを外部に引き出します。穴の隙間は、百均で購入したレジンで埋めます。

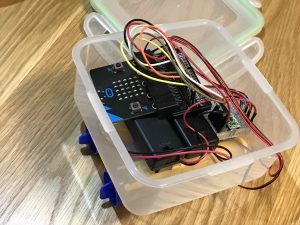
同じく、百均で購入した、パッキン付きケースの底に、モーターを貼り付けます。ケースの側面にも穴を開け、コードをケースの中に引き込みます(こちらの穴の隙間も、レジンで埋めます)。

ケースの中に、前回のロボットのパーツ(micro:bit、モータードライバ、電池)をそのまま放り込み、モーターから引き出したコードをつなぎます。
これでできあがりです。

結果
一応、水上でも、進行方向が制御できています。
(LEDに表示される矢印の向きと、実際の進行方向があっていません。左右のモータの配線を逆にしてしまったようです。)