ESPr Developer を使って、スマホからWiFi経由で操作できるロボットを作成しています。
第1回では、ESPr Developerを使って、リモコンロボット(クローラータイプ)のモータを制御するための電子回路ハードウエアを作成しました。
第2回では、Webブラウザでロボットを操作するためのHTMLファイルを、第3回では、ESPr DeveloperをWebサーバにするためのスケッチを作成し、どちらもESPr Developerに書き込みました。
今回は、電子回路ハードウエアをロボットに取り付け、実際にスマホから操作してみたいと思います。
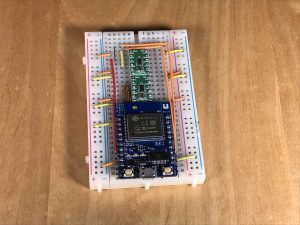
第1回で作成した電子回路ハードウエアはこちらです。ESPr Developerをひとつ、2CHのモータドライバをふたつ搭載しており、4個までのモータの動作を制御できます。
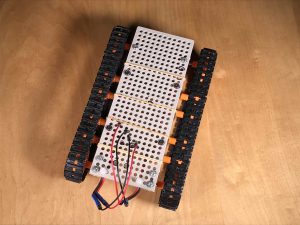
電子回路ハードウエアを取り付けるロボットはこちらです。ふたつのモータで左右のキャタピラを動かすだけのものです。もともと上部に付いていたロボットハンドは、今回は取り除き、ただ走るだけの状態にしています。モータをブレッドボードに接続するために、モータの端子にコネクタピンを取り付けています。
まず最初に、ハードウエアに電池を取り付けます。
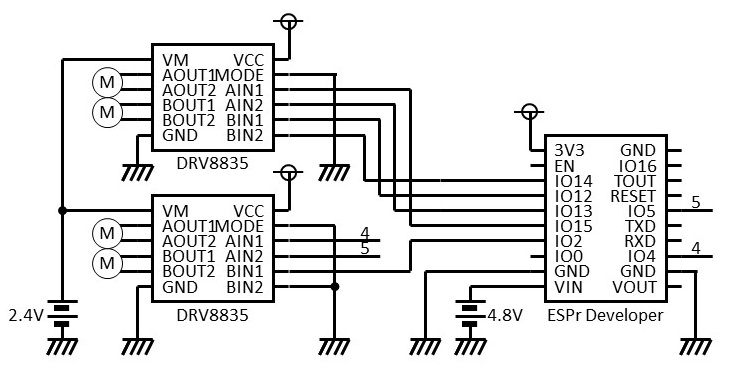
ESPr Developerとモータを同じ電池で駆動しようとすると、ESPr DeveloperのWiFi接続が不安定になってしまったため、両者の電池を分けることにしました。今回は、ESPr Developerには単三のニッケル水素電池を4本(1.2V*4=4.8V)、モータ用には同じ電池を2本(1.2V*2=2.4V)使うことにしました。
回路図は以下のとおりです。
ブレッドボードに電池を取り付けると、以下のようになります。

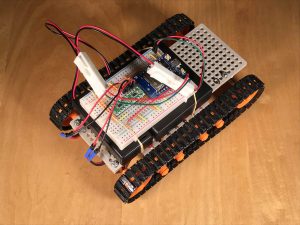
次に、これらをロボットに載せ、モータを接続します。輪ゴムで簡単に固定しているだけです。
いよいよ動かします。
電池をONにした後、スマホでWiFi設定メニューを開くと、WiFiネットワークの中に「robot04」というのが現れますので、それを選択し、パスワード入力欄で「testdata」と入力します。どちらもスケッチの中で定義しているものです。

次に、SafariなどのWebブラウザを開き、アドレス欄に「192.168.4.1」と入力します。これでESPr Developerに格納したHTMLファイルを表示できます。

あとは各ボタンを押すだけで、ロボットを操作できます。
つづきは こちら。